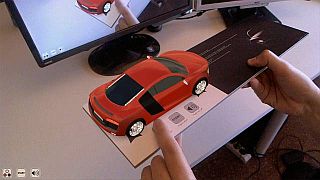
This plugin was developed by Paradox D&D, specialists for augmented reality. The plugin uses markers in order to identify positions and orientations in a live video image. 20 different marker types are available; the marker images can be found in the folder templates\images\markers. They can be printed and attached to a flat surface for placing 3D objects on them in the video image, as the red car in the screenshot below:
The plugin can also control a video camera and capture images. It offers the following functions:
#include <ackar.h>
#define CONFIGURE_DIALOG
#define ID_CAMERA 0
BMAP* bmap_video_camera = NULL; // bmap to render the video camera
PANEL* panel_video_camera = // panel to visualize the render bmap
{
layer = -1;
flags = SHOW | FILTER;
}
function main()
{
vec_fill(sky_color,0); // sky must be transparent for video camera image to be visible
level_load("");
if(!vc_init(ID_CAMERA)) error("Camera not connected");
var buffer_width, buffer_height;
#ifdef CONFIGURE_DIALOG
vc_dialog(&buffer_width,&buffer_height);
#else
vc_getsize(&buffer_width,&buffer_height);
#endif
bmap_video_camera = bmap_createblack(buffer_width, buffer_height, 24);
panel_video_camera.bmap= bmap_video_camera;
while(!key_esc)
{
vc_getbmap(bmap_video_camera);
wait(1);
}
videocamera_close();
sys_exit("");
}
//Example where the camera panel fills the screen
....
BMAP* bmap_video_camera = NULL; // bmap to render the video camera
PANEL* panel_video_camera = // panel to visualize the render bmap
{
layer = -1;
flags = SHOW | FILTER;
}
var buffer_width, buffer_height;
// adjust the render videocamera plane to the actual screen resolution
void fix_panel_videocamera(int res_cam_x,int res_cam_y)
{
if(res_cam_y > 0 && res_cam_x > 0)
{
panel_video_camera.scale_x = screen_size.x/res_cam_x;
panel_video_camera.scale_y = screen_size.y/res_cam_y;
}
}
function main()
{
.....
bmap_video_camera = bmap_createblack(buffer_width, buffer_height, 24);
panel_video_camera.bmap = bmap_video_camera;
fix_panel_videocamera(buffer_width,buffer_height);
.....
}
#include <default.c>
#include <ackAR.h>
// flips the camera buffer for mirror mode
function flip_horizontal(PANEL* panel,BOOL enable)
{
if(enable) panel.scale_x = -abs(panel.scale_x);
else panel.scale_x = abs(panel.scale_x);
ar_flipHorizontal(enable);
}
// places the entity in the position corresponding to the marker
function update_tracking(ENTITY* ent,var id)
{
set(ent,INVISIBLE);
if(ar_update()) // update the tracking
{
if(ar_detect(id)) // is the marker on screen?
{
ar_position(id,ent.x);
ar_angle(id,ent.pan);
// for placing the entity on the marker surface,
// add the rotated vertical center offset
VECTOR* vmin = vec_for_min(NULL,ent);
vmin.x = 0; vmin.y = 0; vmin.z = -vmin.z;
vec_rotate(vmin,ent.pan);
vec_add(ent.x,vmin);
reset(ent,INVISIBLE); // make the entity visible
}
}
}
function main()
{
video_mode = 7;
d3d_antialias = 1;
level_load ("");
// sky must be transparent for seeing the video camera panel
vec_set(sky_color,COLOR_CLEAR);
// model to be placed on marker 1
ENTITY* marker_ent = ent_create("vehicle_1.mdl",NULL,NULL);
// initialize the video camera
if(!vc_init(0)) error("Video camera not found!");
var buffer_width,buffer_height;
vc_dialog(&buffer_width,&buffer_height);
// cover the screen with a video panel
PANEL* video_panel = pan_create(NULL,-1);
video_panel.bmap = bmap_createblack(buffer_width,buffer_height,24);
video_panel.scale_x = screen_size.x/buffer_width;
video_panel.scale_y = screen_size.y/buffer_height;
flip_horizontal(video_panel,true);
set(video_panel,SHOW|FILTER);
// initialize tracking for 1 marker of 100 mm
var markers[1] = { 0 };
if(!ar_init(markers,1,100,600)) error("Can't initialize tracking!");
while(!key_esc)
{
if(vc_getbmap(video_panel.bmap)) // get frame from video camera
update_tracking(marker_ent,0);
wait(1);
}
// close video camera on exit
vc_close();
sys_exit(NULL);
}
► latest version online